科学・基礎/半導体物理学
23.クローニッヒ・ペニーポテンシャル前項ではポテンシャルエネルギーが周期的である場合の電子の波動関数の性質についてブロッホの定理を紹介しました。このブロッホの定理はポテンシャルエネルギーが周期的であれば、一般的に成り立つものです(だから定理なのですが)。ここではさらに一歩進めて、具体的に波動関数を計算してみましょう。
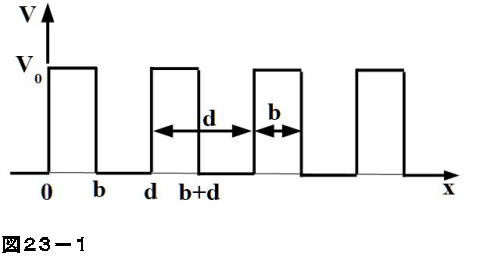
図23-1のように矩形のポテンシャルの山が一定周期で続く1次元のモデルを仮定します。最初にこのモデルの計算を行った2人の名をとって、クローニッヒ・ペニー(Kronig-Penney)ポテンシャルと呼ばれます。
このポテンシャルを言葉で書けば、幅 \(b\) の \(V=V_{0}\) の部分が周期 \(d\) で繰り返し、他の部分は \(V=0\) になっているモデルです。そこでまず \(V=0\) と \(V=V_{0}\) の場合に分けてシュレディンガー方程式の解を求めます。
一般的に書けば、\(n\) を整数として \[b + \left ( n-1 \right )d< x< nd\] の範囲では \(V=0\) ですから、シュレディンガー方程式は \[\frac{\mathrm{d}^{2} \varphi_{1} }{\mathrm{d} x^{2}} + \frac{2m}{\hbar^{2}}E\varphi _{1}= 0\tag{1}\] です。これまでのようにこの方程式の一般解は \[\varphi _{1}= A_{1+}\mathrm{e}^{i\hbar^{-1}p_{1}x}+A_{1-}\mathrm{e}^{-i\hbar^{-1}p_{1}x}\tag{2}\] です。ここで \[p_{1}= \frac{\sqrt{2mE}}{\hbar}\] です。また
\[nd< x< nd+b\] の範囲では \(V=V_{0}\) ですから、シュレディンガー方程式は \[\frac{\mathrm{d}^{2} \varphi _{2}}{\mathrm{d} x^{2}}+\frac{2m}{\hbar^{2}}\left (E-V_{0} \right )\varphi _{2}= 0\tag{3}\] となります。この方程式の一般解は \[\varphi_{2}= A_{2+}\mathrm{e}^{i\hbar^{-1}p_{2}x}+A_{2-}\mathrm{e}^{-i\hbar^{-1}p_{2}x}\tag{4}\] です。ここで \[p_{2}= \frac{\sqrt{2m\left ( E-V_{0} \right )}}{\hbar}\] です。
一方、このポテンシャルは周期をもっているので、ブロッホの定理が成り立ちます。\(u_{k}\left ( x \right )\) を周期関数とすれば、 \[u_{k}\left ( x \right )= \varphi \mathrm{e}^{-ikx}\tag{5}\] であることになりますが、 \(u_{k}\left ( x \right )\) はまた \(x=0\) と \(d\) でつながっている必要があります。 \[u_{k}\left ( 0 \right )=u_{k}\left ( d \right )\tag{6}\] さらに滑らかにつながっているためにはその1次の微分係数も \(x=0\) と \(d\) で等しい必要があります。 \[\left ( \frac{\mathrm{d}u_{k} }{\mathrm{d} x} \right )_{x=0}= \left ( \frac{\mathrm{d}u_{k} }{\mathrm{d} x} \right )_{x=d}\tag{7}\]
この条件は(5)式よりそれぞれ \[\begin{align}\varphi _{1}\left ( d \right )\mathrm{e}^{-ikd} &= \varphi _{2}\left ( 0 \right )\tag{8} \\ \left ( \frac{\mathrm{d}\varphi _{1}}{\mathrm{d} x} \right )_{x= d}\mathrm{e}^{-ikd} &= \left ( \frac{\mathrm{d} \varphi_{2} }{\mathrm{d} x} \right )_{x= 0}\tag{9}\end{align}\] となります。これが周期ポテンシャルがある場合に波動関数に要求される条件ですから、(2)、(4)式の2つの波動関数 \(\varphi _{1}\) と \( \varphi _{2}\) を(8)、(9)式に入れると、 \[\begin{align} \left [A_{1+}\mathrm{e}^{i\hbar^{-1}p_{1}d} + A_{1-}\mathrm{e}^{-i\hbar^{-1}p_{1}d} \right ]\mathrm{e}^{-ikd} &= A_{2+} + A_{2-}\tag{10} \\ p_{1} \left [A_{1+}\mathrm{e}^{i\hbar^{-1}p_{1}d} -A_{1-}\mathrm{e}^{-i\hbar^{-1}p_{1}d} \right ]\mathrm{e}^{-ikd} &= p_{2}\left ( A_{2+}-A_{2-} \right )\tag{11}\end{align}\] が得られます。さらに \(x=b\) においても同じ条件が必要ですから \[\begin{align} A_{1+}\mathrm{e}^{i\hbar^{-1}p_{1}b} + A_{1-}\mathrm{e}^{-i\hbar^{-1}p_{1}b} &= A_{2+}\mathrm{e}^{i\hbar^{-1}p_{2}b} + A_{2-}\mathrm{e} ^{-i\hbar^{-1}p_{2}b}\tag{12} \\ p_{1} \left [A_{1+}\mathrm{e}^{i\hbar^{-1}p_{1}b} -A_{1-}\mathrm{e}^{-i\hbar^{-1}p_{1}b} \right ]\mathrm{e}^{-ikd} &= p_{2}\left ( A_{2+}\mathrm{e}^{i\hbar^{-1}p_{2}b}-A_{2-}\mathrm{e} ^{-i\hbar^{-1}p_{2}b}\right )\tag{13}\end{align}\] が得られます。この4つの方程式の未知数を \(A_{1+}\)、\(A_{1-}\)、\(A_{2+}\)、\(A_{2-}\) とすれば、未知数は4つになりますから(10)から(13)の4式からなる連立方程式は原理的には解けることになります。
式(10)~(13)を行列の形で書いてみます。 \[Z= \mathrm{e}^{-ikd}\] と置いて \[\begin{pmatrix} Z\mathrm{e}^{i\hbar^{-1}p_{1}d} & Z\mathrm{e}^{-i\hbar^{-1}p_{1}d} & -1 &-1 \\ p_{1} Z\mathrm{e}^{i\hbar^{-1}p_{1}d} & -p_{1}Z\mathrm{e}^{-i\hbar^{-1}p_{1}d} & -p_{2} & p_{2} \\ \mathrm{e}^{i\hbar^{-1}p_{1}b} & \mathrm{e}^{-i\hbar^{-1}p_{1}b} & -\mathrm{e}^{i\hbar^{-1}p_{2}b} & -\mathrm{e}^{-i\hbar^{-1}p_{2}b} \\ p_{1}\mathrm{e}^{i\hbar^{-1}p_{1}b} & -p_{1}\mathrm{e}^{-i\hbar^{-1}p_{1}b} & -p_{2}\mathrm{e}^{i\hbar^{-1}p_{2}b} & p_{2}\mathrm{e}^{-i\hbar^{-1}p_{2}b} \end{pmatrix} \begin{pmatrix} A_{1+}\\ A_{1-} \\ A_{2+} \\ A_{2-} \end{pmatrix} = 0\tag{14}\] これは右辺が 0 の4元連立方程式です。右辺が 0 の多元連立方程式を斉次方程式といいます(永年方程式ということもあります)。
ここでもっとも簡単な2元の斉次方程式の例を挙げます。 \[\begin{align} ax+by &= 0 \\ cx+dy &= 0\end{align}\] この方程式の解ですが、\(x\) も \(y\) も 0 ならばこの方程式を満たしますから、これが一つの解です。これは当たり前なので、「自明な解」と言われます。両方とも 0 の自明な解は普通は役に立ちません。0 でない解があるかが問題です。
今、例えば \(x=b\)、\(y=-a\) とすると、これは少なくとも上の式は満たします。これが下の式も満たすための条件は \[cb-da= 0\] です。この条件が満たされていれば、上の斉次方程式は自明でない解をもつことがわかります。\(x\)、\(y\) に同じ数をかけたものや、正負を逆にしたものも解になりますから、解の組は一組ではなく無数にあることになります。
上の2元連立方程式を行列の形で書くと \[\begin{pmatrix} a & b\\ c & d \end{pmatrix} \binom{x}{y}= 0\] です。行列に対応して行列式というものがあります。上の方程式の係数行列に対応する行列式は \[\begin{vmatrix} a &b \\ c &d \end{vmatrix}\] のように書かれます。行列式は行列とは違って一つの値を示しています。上の行列式の値は \[ad-bc\] で、さきほどの斉次方程式に自明でない解がある条件の式の左辺と一致しています(符号は逆ですが)。2元ではわかりませんが、4元の行列式の例を示すと、行列式の値の計算の仕方の規則がわかります。それを示すと \[\begin{gather}\begin{vmatrix} a_{11} & a_{12} & a_{13} & a_{14}\\ a_{21} & a_{22} & a_{23} & a_{24}\\ a_{31} & a_{32} & a_{33} & a_{34}\\ a_{41} & a_{42} & a_{43} & a_{44} \end{vmatrix} \\ = a_{11}a_{22}a_{33}a_{44}+a_{12}a_{23}a_{34}a_{41}+a_{13}a_{24}a_{42}a_{31}+a_{14}a_{43}a_{32}a_{21}\end{gather}\] となります。要素を対角線の方向に掛け合わせ、掛け合わせる方向が右下がりの場合はプラス、左下がりの場合はマイナスの符号を付けます。
ここでは証明はしませんが、「多元であっても係数行列に対応する行列式が 0 であればその多元斉次方程式は自明でない解をもつ」という定理があります。
この定理をさっそく本題の方程式に適用してみます。 \[\begin{vmatrix} Z\mathrm{e}^{i\hbar^{-1}p_{1}d} & Z\mathrm{e}^{-i\hbar^{-1}p_{1}d} & -1 &-1 \\ p_{1} Z\mathrm{e}^{i\hbar^{-1}p_{1}d} & -p_{1}Z\mathrm{e}^{-i\hbar^{-1}p_{1}d} & -p_{2} & p_{2} \\ \mathrm{e}^{i\hbar^{-1}p_{1}b} & \mathrm{e}^{-i\hbar^{-1}p_{1}b} & -\mathrm{e}^{i\hbar^{-1}p_{2}b} & -\mathrm{e}^{-i\hbar^{-1}p_{2}b} \\ p_{1}\mathrm{e}^{i\hbar^{-1}p_{1}b} & -p_{1}\mathrm{e}^{-i\hbar^{-1}p_{1}b} & -p_{2}\mathrm{e}^{i\hbar^{-1}p_{2}b} & p_{2}\mathrm{e}^{-i\hbar^{-1}p_{2}b} \end{vmatrix} = 0\tag{15}\] を計算します。その結果は \[\begin{gather} Z^{2}+\frac{p_{1}^{2}+p_{2}^{2}}{ip_{1}p_{2}}\sin\frac{p_{1}\left ( d-b \right )}{\hbar}\sinh\frac{ip_{2}b}{\hbar}Z \\ =-2\cos\frac{p_{1}\left ( d-b \right )}{\hbar}\cosh\frac{ip_{2}b}{\hbar}Z-1= 0\tag{16}\end{gather}\] なお、\(\sinh\)、\(\cosh\) と書いたのは双曲線関数でハイパボリックサイン、ハイパボリックコサインなどと読みますが、定義は \[\begin{align} \sinh x &= \frac{\mathrm{e}^{x}-\mathrm{e}^{-x}}{2} \\ \cosh x &= \frac{\mathrm{e}^{x}+\mathrm{e}^{-x}}{2}\end{align}\] です。
少し数式展開のテクニックになりますが、上式の \(Z\) をその共役複素数 \(Z^{*}\) で置き換え、もとの式から引き算することを考えます。またオイラーの公式によって \[\begin{align} Z-Z^{*} &= -2i\sin {kd} \\ Z^{2}-Z^{*2} &= -2i\sin {2kd}\end{align}\] ですから、引き算した式は \[\begin{gather}\sin {2kd}+\frac{p_{1}^{2}+p_{2}^{2}}{ip_{1}p_{2}}\sin\frac{p_{1}\left ( d-b \right )}{\hbar}\sinh\frac{ip_{2}b}{\hbar}\sin {kd} \\ -2\cos\frac{p_{2}\left ( d-b \right )}{\hbar}\cosh\frac{ip_{2}b}{\hbar}\sin {kd}= 0\tag{17}\end{gather}\] となります。この式が成り立つためには \[\sin kd= 0\] か、または \[\begin{gather} \cos {kd}= \frac{p_{1}^{2}+p_{2}^{2}}{ip_{1}p_{2}}\sin\frac{p_{1}\left ( d-b \right )}{\hbar}\sinh\frac{ip_{2}b}{\hbar} \\ +\cos\frac{p_{1}\left ( d-b \right )}{\hbar}\cosh\frac{ip_{2}b}{\hbar}\tag{18}\end{gather}\] が成り立つ必要があります。
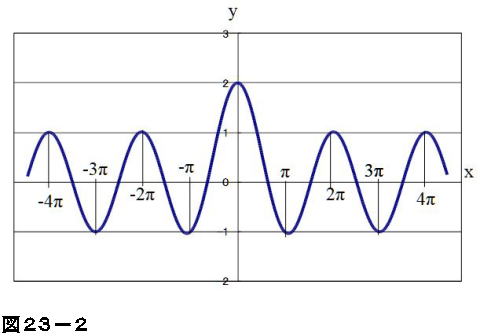
クローニッヒとペニーによれば、簡単化のために \(V_{0b}\) は一定に保ち、 \[V_{0} \to \infty\] という極限を考えます。このとき \[\begin{align} \sinh\frac{ip_{2}b}{\hbar} &\rightarrow \frac{ip_{2}b}{\hbar} \\ \cosh\frac{ip_{2}b}{\hbar} &\rightarrow 1\end{align}\] であることを考えると(18)式は \[\frac{mV_{0}bd}{\hbar^{2}}\frac{\hbar}{p_{1}d}\sin\frac{p_{1}d}{\hbar}+\cos\frac{p_{1}d}{\hbar}= \cos kd\tag{19}\] とだいぶ簡単な形になります。これがクローニッヒ・ペニーポテンシャルに対して巡回境界条件が与えられたときの波動関数が存在する条件式です。
図23-2は(19)式の関数を \(y\) とし、\(p_{1}d/\hbar\) を変数 \(x\) と置き \[y= \frac{c}{x}\sin x+\cos x\] をプロットしたものです。ただし、\(c\) は定数で、図では \(c=1\) としました。