光デバイス/光制御素子
<付録2>主軸変換
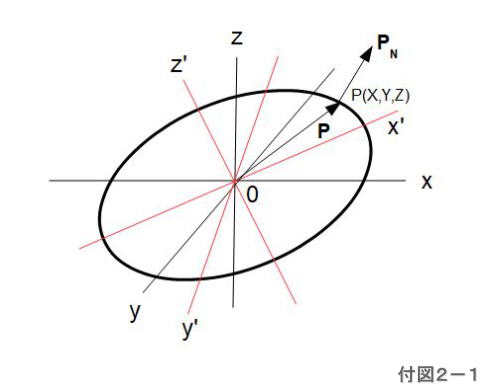
付図2-1に示すようなxyz座標系における一般の回転楕円体の方程式は
\[a_{11}x^2 +a_{22}y^2 +a_{33}z^2+2a_{13}xz+2a_{23}yz+2a_{12}xy=1\tag{1}\]
と表されます。この楕円体の主値、すなわちもっとも長い3つの径を求めるためには図のx'y'z'座標軸(これを主軸と言います)を求める必要があります。このようなxyz座標系からx'y'z'座標系を求め変換することを主軸変換と呼んでいます。
この主軸変換を行う基本的な考え方はつぎの通りです。楕円体表面上に任意の点Pをとり、Pにおける法線ベクトルNを求めます。このベクトルNが楕円体の中心をOとしたときベクトルOPと平行であれば点Pは主軸上にあることになります。
(1)式で表される楕円体上に任意の点Pの座標を \(\left (X,Y,Z \right )\) とし、P点における法線ベクトルをPNとすると、PNのxyz成分表示は
\[\boldsymbol{P}_N =\left (a_{11}X+a_{12}Y+a_{13}Z,~~a_{21}X+a_{22}Y+a_{23}Z,~~a_{31}X+a_{32}Y+a_{33}Z\right )\]
と書けます。原点Oから点Pに向かうベクトルを \(\boldsymbol{P}=\left (X,Y,Z\right )\) とすると、点Pが主軸上にあるためには \(A\) を定数として
\[\boldsymbol{P}_N -A\boldsymbol{P}=0\]
が成り立たなければなりません。この式を成分で書き下すと
\[(a_{11}-A)X+a_{12}Y+a_{13}Z=0\]
\[a_{21}X+(a_{22}-A)Y+a_{23}Z=0\tag{2}\]
\[a_{31}X+a_{32}Y+(a_{33}-A)Z=0\]
という斉次方程式が得られます。この方程式が0でない解をもつためには
\[\left |\matrix{a_{11}-A & a_{12} & a_{13} \cr a_{21} & a_{22}-A & a_{23} \cr a_{31} & a_{32} & a_{33}-A \cr}\right |=0\]
が成り立たなければなりません。いま \(A\) の3つの解を \(A_1\)、\(A_2\)、\(A_3\) とし、(2)式の \(A\) に代入すると、\(X\)、\(Y\)、\(Z\) の組 \(\left (X_1 ,Y_1 ,Z_1 \right ),\left (X_2 ,Y_2 ,Z_2 \right ),\left (X_3 ,Y_3 ,Z_3 \right )\) を求めることができます。
これを用いると変換後の主軸 \(\left (x',y',z'\right )\) は
\[x'=\frac{x}{X_1}=\frac{y}{Y_1}=\frac{z}{Z_1}\]
\[y'=\frac{x}{X_2}=\frac{y}{Y_2}=\frac{z}{Z_2}\]
\[z'=\frac{x}{X_3}=\frac{y}{Y_3}=\frac{z}{Z_3}\]
で与えられ、この主軸の系で楕円体の方程式は
\[A_1 x'^2 +A_2 y'^2 +A_3 z'^2 =1\]
と与えられることになります。