光デバイス/受光素子
21.位置検出素子
物がどこにあるか、その位置を検知し、その結果をもとに何らかの動作をする装置は例えばロボットに必要とされますが、その他いろいろな局面で使われています。このような位置を検出する素子の原理は様々です。ここで言う位置検出素子はもちろん受光素子を使ったもので、光の当たっている位置を検知する素子です。英語では”Position Sencing Device”と言い、略してPSDと呼ばれることもあります。
ある区切られた面のどこに光が当たっているか知る方法としてすぐ思いつくのは受光素子を縦横にたくさん並べることです。このような素子を複数並べたもの(アレイ)を使えば、左から何番目、上から何番目の素子に光が当たっているかを調べればよいことになります。
このような受光素子のアレイは画像を観測する素子として使われています。デジタルカメラの撮像素子として使われているCCDとかCMOSというのがこれです。原理については後の項で説明します。現在では1000万画素などというものが当たり前になっていますが、これは縦横大体3000×3000もの素子を並べたものに相当しますから、非常に細かく位置が分かる素子です。
ただこのような撮像素子は膨大な数の素子から測定結果を取り出して処理するために複雑な構造で、作るのも非常に大変です。またこれを動かす外部回路も複雑なものを用意しなければなりません。単にどこか1点に光が来ていることを知るだけのためには少しもったいない感じがします。
実はもっと簡単な構造の素子があります。これはCCDなどが発明されるより前から原理的には知られていたもので、CCDをデジタル式とするならば、これはアナログ式と言えるものです。
原理を図21-1によって説明します(1)。素子は多数並べるのではなく1つのpinフォトダイオードです。図の(a)は素子の断面図ですが、光の当たる表面のp型層の両端に電極A、A’を付け、裏面のn型基板には全面に電極Cが付いています。
(b)の平面図を見るとp型層は矩形で、小さな円で示したところ(電極A’からの距離x)に光が当たっています。普通のpinフォトダイオードでは受光面は1つの光ビームを受けられればいいのでもっと小さいのですが、位置検出素子はずっと大きな受光面をもっているところが異なります。
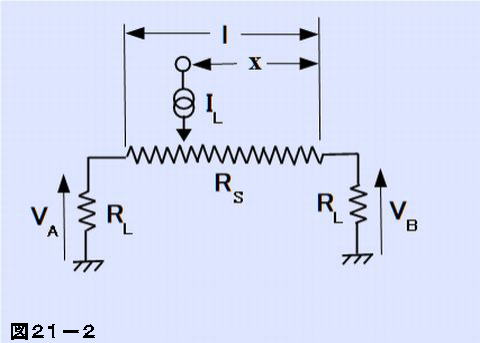
ここで図のようにxの位置に光が当たったとすると、この場所にだけ電子-正孔対ができ、それは両端の電極に向かって流れます。この状態を電気回路で表したのが図21-2です。光の当たっていないときの電極間の抵抗値Rsはかなり高い値です。光が当たっている点と電極の間の抵抗値は光の当たった位置xによって変わります。距離が近ければ抵抗値は小さく、距離が大きければ抵抗値は大きくなり、抵抗値は距離に比例します。
そこで図のように光が当たった位置が左側の電極に近ければ左側へ流れる電流が右側に比べて大きくなります。これは外につないだ抵抗RLの両端に発生する電圧VAとVBを測定すれば、VAの方がVBより大きくなるので分かります。またその値から計算によって光が当たった位置xを求めることもできます。
原理的には電流を正確に計れば計るほど、位置は正確に求められることになります。ただこれは半導体層がどこも完全に一様であることが前提で、抵抗値が場所によって少し違うようですと、電流をいくら正確に計っても位置の結果には誤差が入ってくることになりますから、正確さには限度があります。
原理は一方向で説明しましたが、図21-3のように電極をA、A’に加えてB、B’も設け、縦横2方向に2組にすると、面内の位置を2次元で検出できます(2)。図のように点Xに光が当たったとき、そこから4つの電極との間の抵抗値を考えて位置を求めることになります。
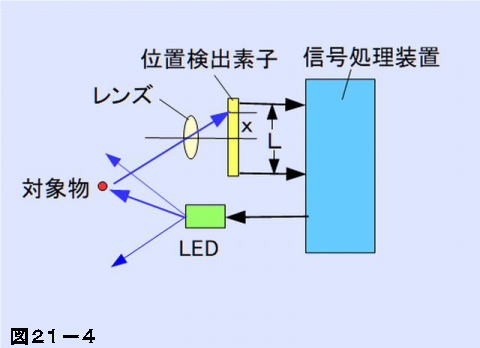
このような位置検出素子の応用例を1つだけ紹介しておきます。図21-4は自動車用のレーダ装置です(3)。前方の障害物、例えば他の自動車を検知して衝突を避けるための装置というのは近年、実際の自動車への搭載がされています。
レーダは普通マイクロ波が使われますが、レーザ光を使ったレーザレーダというものもあります。図の装置では光を使っていますが、光源はレーザ光ではなく、LEDの発散する光を利用した例です。この光が対象物(標的)に当たって反射され、位置検出素子に戻ってきます。その反射光の位置xを位置検出素子で検出すれば、物がどこにあるかが分かるわけです。位置検出にフォトダイオードアレイを使うこともできますが、位置検出素子の方が周辺回路が簡単になるという利点があります。
(1)特開昭59-127883号
(2)特開昭59-050579号
(3)特開平08-082670号
.